Перевод единиц измерения крутящего момента. единицы момента силы, единицы вращательного момента, единицы вертящего момента, единицы вращающего момента. таблица
Содержание:
- Основные параметры электродвигателя
- Принцип действия
- Увеличение КМ
- Крутящий момент двигателя, что это такое?
- Основные параметры электродвигателя постоянного тока
- Асинхронные двигатели с фазным ротором
- Регулирование частотой
- Вращающий момент электродвигателя
- Работа и мощность
- Изменение оборотов асинхронного двигателя. Разбор способов регулирования.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка:
Номинальный вращающий момент М
ном
, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин-1
Начальный пусковой момент – момент электродвигателя при пуске.
Справка:
В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение – значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (механическая), Вт
При этом
потери в электродвигатели обусловлены: электрическими потерями – в виде тепла в результате нагрева проводников с током; магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие; механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии); дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m – масса, кг
Справка:
В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s
2
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
n пр = n обр = f 1 × 60 ÷ p = n 1
n пр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
n обр — число оборотов поля в обратном направлении, об/мин;
f 1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n 1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Увеличение КМ
Для чего и как повысить крутящий момент двигателя? На первую часть вопроса ответить легко. Обычно недовольство КМвозникает у владельцев малолитражек – ходовые характеристики машины снижаются по любому поводу, будь то включенный кондиционер или гидроусилитель руля.
С увеличением характеристики растут и возможности автомобиля. Это разгон и тяговые качества.
Логично предположить, что вторая часть вопроса – как поднять КМ – решается заменой или доработкой комплектующих двигателя. Некоторые способы выполняются самостоятельно, другие требуют профессионального вмешательства. Подробно:
- Замена распредвала, выпускных клапанов и фильтров на детали с большим КПД. Например, возможно использовать вал с коленами большего размера или откорректировать крутящий момент на колесе автомобиля. В последнем случае в коробку передач устанавливаются особые шестерни с высоким передаточным числом. Любители, возможно, не справятся с работой – установку комплектующих лучше отдать на откуп специалистам по автомобильному тюнингу.
- Увеличение объема поршневой системы. Это предполагает расточку цилиндров и замену диаметра поршня на больший. Результат увеличения значения крутящего момента гарантирован из-за возросшей мощности двигателя – закономерного эффекта. Минус способа – увеличение расхода топлива.
- Повышение степени сжатия газовоздушной смеси. Для этого требуется уменьшить объем камеры сгорания, чтобы получить избыток давления. Высокий показатель, естественно увеличит силу поршня, но при этом порог детонирования существенно снижается. Как итог – износ поршневой группы и опасность преждевременного возгорания топлива.
- Увеличение диаметра впускных клапанов. Принцип прост: чем больше топлива, тем выше образование выделяющегося тепла. Это то,что дает крутящий момент двигателя – возрастание энергии. Чтобы установить новые клапана большего диаметра снова требуется расточка деталей. Без опыта, смысла проводить работу, нет – можно легко повредить систему. А новые оригинальные комплектующие – дороги.
- Турбирование. Заключается в доработке головки блока цилиндра. Что дает крутящий момент двигателя в этом случае? После модификации увеличивается объем газовоздушной смеси, следовательно, после детонации мощность кратно возрастает. Соответственно увеличивается КМ. Недостаток способа – дорогостоящая работа, что не всегда оправдано для автомобилей бюджетных классов.
- Электронная настройка, прошивка блока или чип-тюнинг. Заключается в перепрограммировании контролера двигателя. Как узнать о коррекции КМ? Изменения времени открытия впускных клапанов делаются в большую сторону, следовательно, расход топлива увеличится. Кроме временного промежутка, меняется множество других параметров –система охлаждения, вентиляции, воздухозаборников и прочего. Достоинства способа в безопасности – всегда можно вернуть настройки по умолчанию.
- Замена тяжелых поршней на облегченные. Усилий на работу потребуется меньше, динамика двигателя возрастет, повысится скорость автомобиля. Минус – способ годится для бензиновых авто, где степень сжатия меньше и порог детонирования выше. Иначе быстрого износа легких деталей не избежать.
Итак, крутящий момент асинхронного двигателя и мощность – связанные понятия. Вся работа по изменению значения одного параметра влечет за собой коррекцию другого.
13
В сопроводительной документации любого транспортного средства имеются данные о том, какую максимальную мощность развивает силовой агрегат. Но там не всегда можно встретить информацию о величине крутящего момента конкретного двигателя внутреннего сгорания. Известно, что по величине крутящего момента двигателя определяется, сколько потребуется времени, чтобы разогнать машину до максимальной скорости.
Крутящий момент двигателя, что это такое?
Автомобиль является сложным устройством, в состав которого входит большое количество узлов, систем, агрегатов, мелких и крупных деталей. Каждый из перечисленных элементов играет важную роль в слаженной работе авто. Среди большого разнообразия механизмов двигатель внутреннего сгорания выполняет главную функцию, он полностью обеспечивает энергией движения каждый подвижный элемент транспортного средства.
Мотор работает по следующему алгоритму:
- Топливо, поступающее в рабочие цилиндры, сжигается в камере сгорания.
- Поршень приходит в движение под воздействием расширяющихся газов.
- Через кривошипно-шатунный механизм энергия движения передается на коленчатый вал.
- Вращающийся коленвал передает вращение через трансмиссию на ходовую часть.
- Крутящий момент, получаемый от силового агрегата, приводит в движение колеса автомобиля.
Крутящий момент двигателя – расчетный параметр, характеризующий силу, передаваемую поршнем на коленвал. Единица измерения крутящего момента – ньютон метр (сокращенно Н*м). Передача крутящего момента от двигателя к коробке передач производится при помощи элементов механизма разрыва мощности (фрикционных дисков сцепления, гидромуфты, гидротрансформатора).
Основные параметры электродвигателя постоянного тока
- Постоянная момента
- Постоянная ЭДС
- Постоянная электродвигателя
- Жесткость механической характеристики
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения:
- где — электродвижущая сила, В,
- – постоянная ЭДС, В∙с/рад,
- — угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
- где — постоянная электродвигателя, Нм/√ Вт ,
- R — сопротивление обмоток, Ом,
- – максимальный момент, Нм,
- — мощность потребляемая при максимальном моменте, Вт
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
где U — напряжение, В.
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:
Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях .
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:
- где I – сила тока, А
- U — напряжение, В,
- M — момент электродвигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — механическая мощность (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
где — механическая постоянная времени, с
Источник
Асинхронные двигатели с фазным ротором
Основной способ управления АД с фазным ротором — изменение величины скольжения между статором и ротором.
Регулирование с помощью напряжения
Через специальные автотрансформаторы ЛАТР, путем изменения напряжения на обмотках двигателя, производят регулировку оборотов вала.
Данный способ так же подходит и к АД с короткозамкнутым ротором. Таким способ можно регулировать в пределах от минимума до номинальных параметров двигателя.
Установка активного сопротивления в цепи ротора
Переменное реостатное сопротивление или набор сопротивлений в цепи ротора воздействует на ток и поле ротора. Изменяя таким образом величину скольжения и количество оборотов двигателя.
Чем больше сопротивление, тем меньше ток, тем больше величина скольжения АД и меньше скорость.
Достоинства такого регулирования.
- Большой диапазон регулирования оборотами электрической машины.
- Мягкая выходная характеристика мотора.
Недостатки такого способа.
- Уменьшение КПД двигателя.
- Ухудшение рабочих характеристик механизма.
Регулирование частотой
Специальные устройства, преобразователи частоты (другие названия инвертор, частотник, драйвер), подключаются к электрической машине. Путем выпрямления напряжения питания, преобразователь частоты внутри себя формирует необходимые величины частоты и напряжения, и подает их на электрический двигатель.
Необходимые параметры для управления АД преобразователь рассчитывает самостоятельно, согласно внутренним алгоритмам, запрограммированным производителем устройства.
Преимущества регулирование частотой .
- Достигается плавное регулирование частоты вращения электромотора.
- Изменение скорости и направление вращения двигателя.
- Автоматическое поддержание требуемых параметров.
- Экономичность системы управления.
Единственный недостаток, с которым можно смирится, это необходимость в приобретении частотника. Цены на такие устройства совсем незаоблачные, и в пределах 150 уе, можно обзавестись преобразователем для 2 кВт двигателя.
Вращающий момент электродвигателя
В двигателях постоянного тока вращающий момент определяется выражением М ≡ ФIя, т.е. он пропорционален потоку и току якоря. В асинхронном двигателе момент создается вращающимся потоком Ф и током ротора I2. Он может быть выражен
Следовательно, момент пропорционален потоку и активной слагающей тока ротора I2 cos Ψ2, так как только активная слагающая тока определяет мощность, а значит и момент.
На рис. 10-20 представлена схема включения короткозамкнутого двигателя. Если пустить двигатель, включив рубильник 1, то в первый момент пуска, когда п2= 0, a s = 1, наведенная в роторе 2 э. д. с. Е2 и пусковой ток I2п максимальны. Однако, пусковой момент Мп не будет максимальным, а в 2—2,5 раза меньше максимального. Векторная диаграмма для цепи ротора (рис. 10-21), построенная подобно изображенной на рис. 9-9, показывает причину этого.
Рис 10-20. Схема включения короткозамкнутого асинхронного двигателя.
Обычно в роторе х2во много раз больше r2 и угол Ψ2, на который ток I2п отстает от э. д. с. Е2 велик. Поэтому активная слагающая тока I2п cos Ψ2, а значит и пусковой момент Мп малы. В современных асинхронных двигателях Мп/Мп = 1 — 1,5, хотя I2п/ Iн≈ 4,5—6,5.
Это же явление по другому объясняется на рис. 10-19 и 10-22.
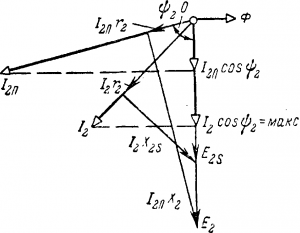
Рис. 10-21. Векторная диаграмма в цепи ротора.
При описании принципа работы двигателя (рис. 10-19) было предположено, что ток I2 совпадает по фазе с э. д. с. Е2, т. е. что он активный ( Ψ2 = 0). На рис. 10-22 представлен момент пуска, когда направление э. д. с. в проводах ротора соответствует обозначенному на рис. 10-19, а ток показан отстающим от э. д. с. на угол Ψ2. Тогда шесть проводов ротора (три под полюсом N и три под полюсом S) создают усилия, действующие в направлении вращения потока, а два провода вызывают противодействующие усилия. В результате этого вращающий момент будет тем меньше, чем больше сдвиг фаз между током I2 и э. д. с. E2.
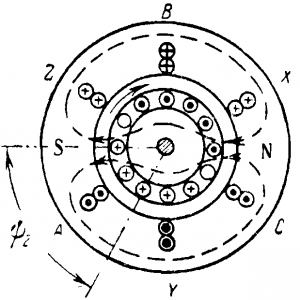
Рис. 10-22. Ток в роторе двигателя в момент пуска.
По мере увеличения скорости вращения ротора реактивное сопротивление обмотки ротора x2s = x2s уменьшается, а вместе с этим уменьшается угол Ψ2, так как сопротивление r2≈ const. Наступает такое положение (рис 10-21), когда при некотором скольжении sм ≈ 0,1—0,15 реактивное сопротивление x2s становится равным активному r2, угол Ψ — 45° и э. д. с. E2s уравновешивает два равных падения напряжения I 2r2 и I2x2s.В это время активная слагающая тока I2 cos Ψ2 и вращающий момент М м становятся максимальными, несмотря на некоторое уменьшение тока I2.
Обычно Мм/Мм = 1,8—2,5 и называется способностью к перегрузкe.
При дальнейшем разгоне ротора x2s становится значительно меньшим, чем r2, им можно пренебречь и считать ток ротора активным (I2 ≈ I2 cos Ψ 2). Так как E2s= E2s тоже продолжает уменьшаться, то вместе с током I2 уменьшается и вращающий момент.
Максимальная скоростьn вращения будет при холостом ходе двигателя и тогда n 2 ≈ n 1 , a s ≈ 0. Зависимость вращающего момента от скольжения М = f (s) представлена на рис. 10-23.
Рис. 10-23. Зависимость вращающего момента двигателя от скольжения.
Нормальная работа двигателя возможна только на участке кривой при скольжениях s от нуля до sм, так как в этом случае при увеличении тормозного момента и значит s вращающий момент возрастает. На участке от s = sм до s = 1 работа двигателя неустойчива. Номинальный момент Мн соответствует обычно номинальному скольжению sн = 1—6%.
Поток Ф пропорционален напряжению U1, подводимому к трансформатору. Сказанное остается в силе и для асинхронного двигателя. Так как М ≡ ФI2 cos Ψ 2, то можно написать, что
Отсюда можно сделать очень важный для асинхронных двигателей вывод
т. е. вращающий момент пропорционален квадрату подведенного к статору напряжения. Таким образом, падение напряжения в сети, например до 0,9 U1н, вызовет уменьшение момента до 0,9 • 0,9 Мн= 0,81 Мн и нагруженный двига тель может остановиться. Указанным обстоятельством и объясняется, частично, нормирование падения напряжения в распределительных сетях, питающих асинхронные двигатели.
В практике потребителя часто интересует механическая характеристика двигателя
п2= f (М) при U1= const и f1 = const. Для удобства пользования по осям откладывают (n2/n1)100% и (М/Мн)100%.
Рис. 10-24. Механическая характеристика двигателя.
Эта характеристика получается простым перестроением рис, 10-23 и показана на рис. 10-24, где рабочая часть обозначена сплошной линией. Кривая 1 для двига телей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости, подобно двигателю постоянного тока параллельного возбуждения. Асинхронный двигатель с фазным ротором для регулирования скорости вращения, например для крановых и подъемных устройств, имеет более мягкую характеристику (кривая 2).
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Изменение оборотов асинхронного двигателя. Разбор способов регулирования.
Благодаря своей простоте исполнения, относительной дешевизне и надежности трехфазные двигатели широко используются в хозяйстве и производстве. Во многих исполнительных механизмах применяют всевозможные типы асинхронных двигателей . Для широкого спектра применения АД, необходимо изменять и регулировать скорость вращения вала двигателя. Регулировка скорости АД производят несколькими способами. Их мы сейчас и рассмотрим.
- Механические регулирование. Путем изменения передаточного числа в редукторах.
- Электрическое регулирование. Изменением нескольких параметров питающего напряжения.
Рассмотрим электрическое изменение скорости АД, как более точный и распространённый способ регулирования.
Управление электрическими параметрами позволяет производить плавный запуск двигателя, поддерживать заданные параметры скорости или момента асинхронного мотора.
Параметры с помощью которых управляют мотором:
- Частотой тока питающей сети.
- Величиной тока в цепях мотора.
- Напряжением на двигателе.
Самым распространённым асинхронным двигателем является мотор беличье колесо, двигатель с короткозамкнутым ротором. Для управления вращением, в этом типе электрических машин, применяют несколько видов воздействия.
- Изменение частоты поля статора.
- Управление величиной скольжения, изменяя напряжение питания.