Принцип работы асинхронного двигателя с короткозамкнутым ротором
Содержание:
- Принцип действия [ править | править код ]
- Основные параметры электродвигателя
- Подключение
- Устройство и принцип действия
- Каков же принцип работы
- Режимы работы
- Отличие от синхронного двигателя
- Трехфазный асинхронный двигатель с фазным ротором
- Подписка на рассылку
- Трехфазный асинхронный двигатель с короткозамкнутым ротором
- Преимущества и недостатки
- Как подключить двигатель к источнику питания
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника
Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
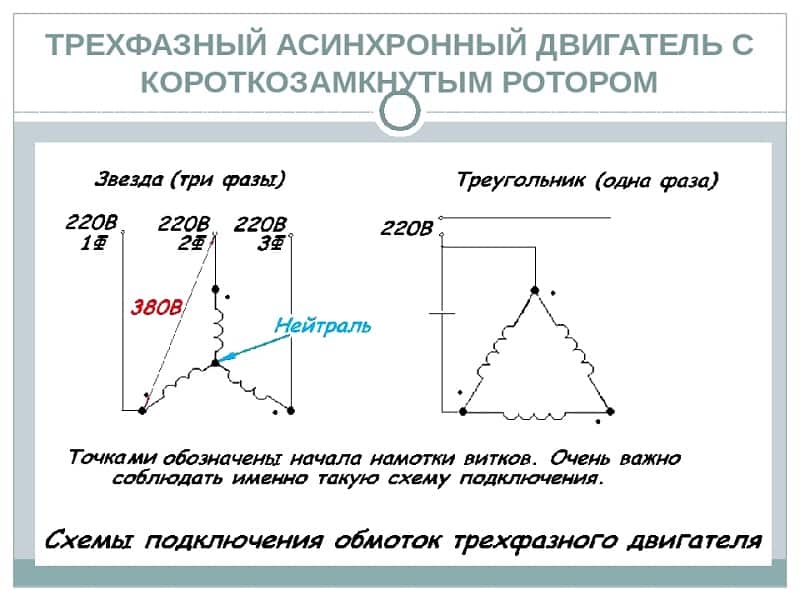
Рис. 4. Схемы подключения
Для подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сеть
С целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
Источник
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.

Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.

Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.

В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.

В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
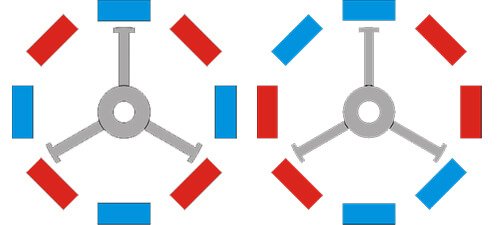
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Режимы работы
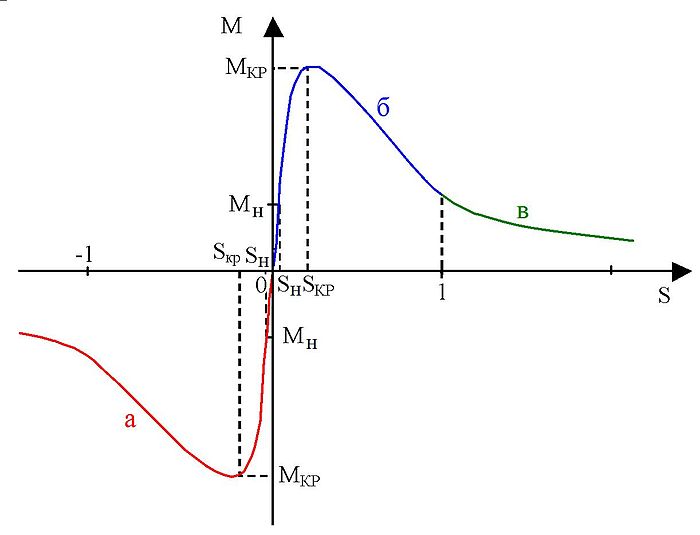
Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим), б — двигательный режим, в — режим противовключения (режим электромагнитного тормоза).
Двигательный режим
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в обмотке ротора возникает ток. На проводники с током этой обмотки (а точнее, на зубцы сердечника ротора), действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор вслед за магнитным полем. Если этот момент достаточен для преодоления сил трения, ротор приходит во вращение, и его установившаяся частота вращения [об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках, вентиляцией и т. д. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать вращающий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
Относительная разность частот вращения магнитного поля и ротора называется скольжением
:
Очевидно, что при двигательном режиме .
Генераторный режим
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим
. При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение .
Для работы асинхронной машины в генераторном режиме требуется источник реактивной мощности, создающий магнитное поле. При отсутствии первоначального магнитного поля в обмотке статора поток создают с помощью постоянных магнитов, либо при активной нагрузке за счёт остаточной индукции машины и конденсаторов, параллельно подключенных к фазам обмотки статора.
Асинхронный генератор потребляет реактивный ток и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов , батарей статических конденсаторов (БСК). Из-за этого, несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном в качестве ветрогенераторов малой мощности, вспомогательных источников небольшой мощности и тормозных устройств. Зато генераторный режим асинхронного двигателя используется довольно часто. В таком режиме работают двигатели эскалаторов метро, которые едут вниз. В генераторном режиме работают двигатели лифтов, в зависимости от соотношения веса в кабине и в противовесе.
Режим холостого хода
Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа. Из опыта холостого хода могут быть определены значения намагничивающего тока и мощности потерь в магнитопроводе, в подшипниках, в вентиляторе. В режиме реального холостого хода s
=0,01-0,08. В режиме идеального холостого хода n
2 =n
1 , следовательно s
=0 (на самом деле этот режим недостижим, даже при допущении, что трение в подшипниках не создаёт свой момент нагрузки — сам принцип работы двигателя подразумевает отставание ротора от поля статора для создания поля ротора. При s
=0 поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора.)
Режим электромагнитного тормоза (противовключение)
Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Для режима справедливы неравенства:
Этот режим применяют кратковременно, так как при нём в роторе выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя.
Для более мягкого торможения может применяться генераторный режим, но он эффективен только при оборотах, близких к номинальным.
Отличие от синхронного двигателя
Наряду с простыми асинхронными электрическими машинами в промышленности также используются и синхронные агрегаты. Основным отличием синхронного двигателя является наличие вспомогательной обмотки на роторе, предназначенной для создания постоянного магнитного потока, что показано на рисунке 4 ниже.

Рис. 4. Отличие асинхронного от синхронного электродвигателя
Эта обмотка создает магнитный поток, не зависящий от наличия электродвижущей силы в обмотках статора электродвигателя. Поэтому при возбуждении синхронного электродвигателя его вал начинает вращаться одновременно с полем статора. В отличии от асинхронного типа, где существует разница в движении, которая физически выражается как скольжение и рассчитывается по формуле:
где s – это величина скольжения, измеряемая в процентах, n1 – частота, с которой вращается поле статора, n2 – частота, с которой вращается ротор.
Синхронные электродвигатели применяются в тех устройствах, где важно соблюдать высокую точность синхронизации подачи питания и начала движения. Также они обеспечивают сохранение рабочих характеристик в момент пуска
На практике существует огромное количество разновидностей асинхронных электродвигателей, отличающихся как сферой применения, так и мощностью согласно ГОСТ 12139-84 . В связи с тем, что все вариации перечислить невозможно, мы рассмотрим наиболее значимые критерии, по которым асинхронные аппараты разделяются на виды.
По количеству питающих фаз выделяют:
- трехфазные – используются в сетях, где есть возможность подключиться сразу ко всем фазам, но в частных случаях могут запускаться и в однофазной сети;
- двухфазные – применяются во многих бытовых приборах, состоят из двух рабочих обмоток, одна из которых питается напряжением сети, а вторая подключается через фазосдвигающий конденсатор.
- однофазные – как и предыдущая модель содержат две обмотки, одна из которых рабочая, а вторая пусковая.
По типу ротора различают:

- с короткозамкнутым ротором – имеет тяжелый пуск, но и меньшую стоимость;
- с фазным ротором – на роторе устанавливается вспомогательная обмотка, делающая работу электродвигателя более плавной.
Рисунок 5: асинхронный двигатель с короткозамкнутым и с фазным ротором
По способу подачи питания:
- статорные – классические модели, в которых рабочие обмотки устанавливают на статор;
- роторные – рабочие обмотки помещаются на вращающемся элементе, широкое применение на практике получили асинхронные двигатели Шраге-Рихтера.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в “звезду”, а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Подписка на рассылку
Асинхронный электродвигатель с короткозамкнутым ротором состоит из двух основных элементов: статора (представляет собой неподвижную, внешнюю часть электродвигателя) и ротора (подвижная, расположенная внутри статора часть электрической машины). Каждый из этих элементов состоит, в свою очередь, из сердечника и обмотки. Обмотку статора, которую подключают к сети, можно считать первичной, а обмотку ротора — вторичной.
Сердечник статора собирается из совокупности листов, изготовленных из электротехнической стали и покрытых специальным лаком. Так уменьшаются потери на вихревые токи. В открытых пазах сердечника укладываются трехфазные обмотки, расположенные симметрично под углом 120 градусов.
Ротор представляет собой вал, опирающийся на подшипники, на котором укреплены сердечник и обмотки. Сердечник ротора также выполнен из набора штампованных листов. Обмотка ротора изготовлена из медных или алюминиевых стержней (размещенных в пазах его сердечника), концы которых соединены накоротко с кольцами. Это и есть короткозамкнутая роторная обмотка, внешний вид которой напоминает беличье колесо (рис. 1).
Принцип работы двигателя данного типа состоит в следующем. После подачи напряжения на обмотку статора появляется магнитный поток. Он изменяется с частотой, равной частоте используемого переменного тока. Из-за сдвига потоков в обмотках по времени и в пространстве результирующее поле получается вращающимся. Оно индуцирует ЭДС в проводниках ротора. В результате чего возникают токи, которые взаимодействуют с этим полем. Их взаимодействие создает пусковой момент. Ротор начинает вращаться в направлении вращающегося поля, но с другой частотой. Величину, характеризующуюся относительную разность этих частот, называют скольжением.
Трехфазный асинхронный короткозамкнутый электродвигатель получил наибольшее распространение среди машин подобного типа благодаря своим качествам и конструктивным особенностям:
Вместе с тем асинхронный двигатель с короткозамкнутым контуром имеет и существенные недостатки:
Асинхронные электродвигатели бывают различного технологического и конструктивного исполнения. В частности, электродвигатели АИР являются унифицированными для общепромышленных целей. Электродвигатель асинхронный трехфазный АИР имеет разные модификации. АИР представляет собой электродвигатель асинхронный трехфазный, характеристики которого аналогичны параметрам двигателей типа 5АМ, 5АИ, АМУ, 7АИ. Его устанавливают на вентиляторах, насосах, компрессорах и других электромеханических установках.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.Статор
состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Ротор
состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
,
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
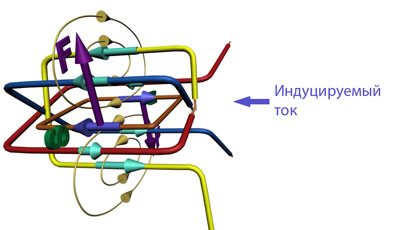
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.