Бесщеточный двигатель принцип работы
Содержание:
- Как запустить бесколлекторный двигатель?
- Три фазы
- Звезда и Треугольник
- Устройство и принцип действия
- Преимущества бесколлекторного двигателя
- Особенности работы вентильных двигателей
- Характеристики
- Принцип работы бесколлекторного мотора
- Основные характеристики двигателя
- Возможно, вам также будет интересно
- Принцип работы
- Принцип действия BLDC двигателей
- Большой диаметр, большое число полюсов
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
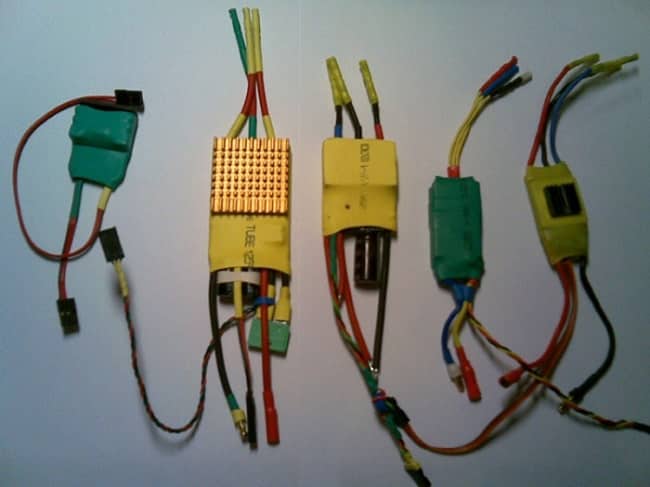
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
Максимальная величина штатного напряжения для продолжительной работы.
Сопротивление внутренних цепей контроллера.
Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне)
Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество
Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы — это обмотки двигателя. Поэтому если сказать «трехобмоточный», думаю, это тоже будет правильно. Три обмотки соединяются по схеме «звезда» или «треугольник». Трехфазный бесколлекторный двигатель имеет три провода — выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
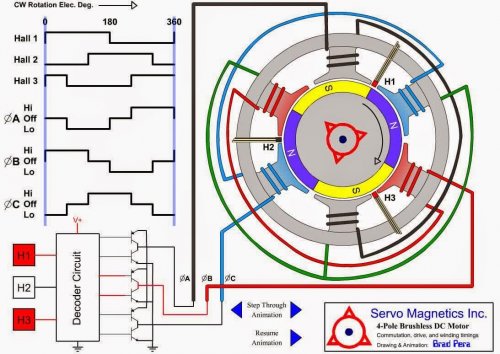
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться «шагами» на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы «на пальцах»
Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
Статьи по бесколлекторным моторам:
- Что такое Бесколлекторный мотор?
- Устройство бесколлекторного мотора
- Как управлять бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Как управлять бесколлекторным мотором без датчиков (Sensorless BLDC)
- Запуск бездатчикового бесколлекторного мотора (Sensorless BLDC)
- Определение положения ротора бесколлекторника в остановленном состоянии
- Контроллер бесколлекторного мотора. Структура ESC
- Схема контроллера бесколлекторного мотора (ESC)
- Силовая часть контроллера бесколлекторного мотора
- Литература по бесколлекторнм моторам
- Примеры на С для управления бесколлекторными моторами
- Схема контроллера бесколлекторного мотора BLDC, PMSM на микроконтроллере STM32
- STM32. Управление бесколлекторным мотором (BLDC)
- STM32. Пример регулятора для бесколлекторного PMSM
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление
Звезда и Треугольник
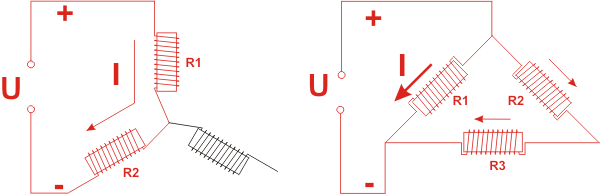
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Источник
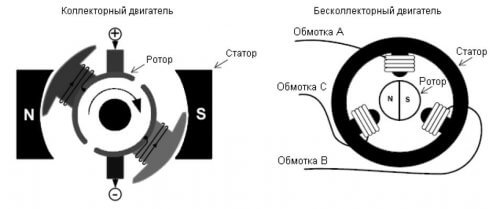
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
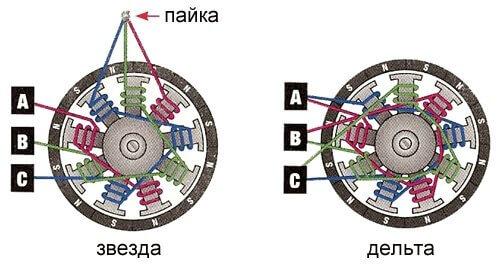
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
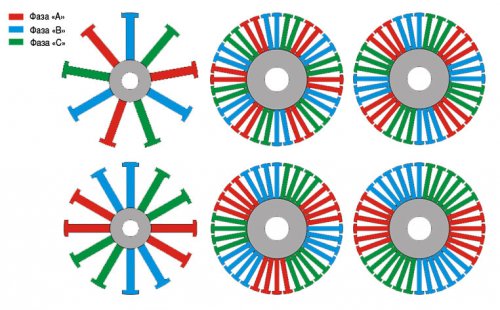
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
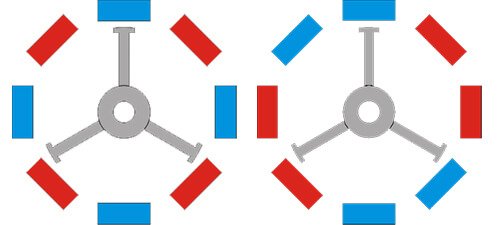
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Особенности работы вентильных двигателей
Вентильные двигатели относятся к электрическим машинам специального назначения. Своим названием они обязаны применению в них устройств для выпрямления тока — вентилей. Достоинства вентильных электродвигателей:
- изменение скорости вращения в широких пределах;
- более высокий коэффициент полезного действия из-за уменьшения магнитных потерь вследствие малого магнитного сопротивления;
- даже при пиковой нагрузке рабочие характеристики довольно неплохи.
Наряду с преимуществами, они имеют и некоторые недостатки. Но значение их не велико. Основными являются:
- шумность;
- управление требует определённой квалификации обслуживающего персонала;
- высокая цена.
 Области применения их различны: на производстве по добыче нефти, в химической промышленности и установках для бурения скважин.
Области применения их различны: на производстве по добыче нефти, в химической промышленности и установках для бурения скважин.
Основная разница между вентильным и обычным двигателем заключается в конструкции. У вентильного нет некоторых привычных частей конструкции: коллектора и щёточного механизма. Вместо этого установлен коммутатор (инвертор), с помощью которого осуществляется управление вентильным двигателем. На инвертор поступает сигнал от датчика положения ротора.
Датчиками положения ротора могут быть трансформаторные или индуктивные бесконтактные элементы. Наиболее распространёнными являются датчики электродвижущей силы Холла. Такое устройство состоит из небольшой пластины полупроводникового материала. На ней находятся контактные звенья, к которым припаяны выводы, соединённые с источником питания. Выводы выходного сигнала также припаиваются к соответствующим звеньям пластины. Требованиями к датчикам положения ротора являются:
- компактность;
- минимальное значение мощности на входе;
- большая кратность сигнала как максимального, так и минимального;
- надёжная работа при любых условиях окружающей среды.
 Коммутатор выполнен на полупроводниках. Его задача аналогична задаче щёточно-коллекторного узла в обычных двигателях и заключается в изменении направления тока. На сердечнике станины находится обмотка якоря, а на роторе — постоянный магнит. Такая конструкция устраняет возможность скольжения контакта на якоре.
Коммутатор выполнен на полупроводниках. Его задача аналогична задаче щёточно-коллекторного узла в обычных двигателях и заключается в изменении направления тока. На сердечнике станины находится обмотка якоря, а на роторе — постоянный магнит. Такая конструкция устраняет возможность скольжения контакта на якоре.
У вентильного двигателя ток в фазах синусоидального вида. Возбуждение у него может быть двух видов:
- электромагнитное;
- магнитоэлектрическое.
При электромагнитном возбуждении обмотка возбуждения располагается на полюсах. Она подключается к сети благодаря контактным кольцам, размещённым на валу ротора. Таким образом, создание магнитного поля происходит электромагнитным путём.
Характеристики
Основные характеристики двигателя:
- номинальная мощность;
- максимальная мощность;
- максимальный ток;
- максимальное рабочее напряжение;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток;
- угол опережения;
- режим работы;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
 Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток. Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
Максимальное число оборотов двигателя. Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:
- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Выводы:
- В моделировании, в различных технических изделиях, в промышленности и в оборонной технике используются БДПТ, в которых вращающееся магнитное поле формируется электронной схемой.
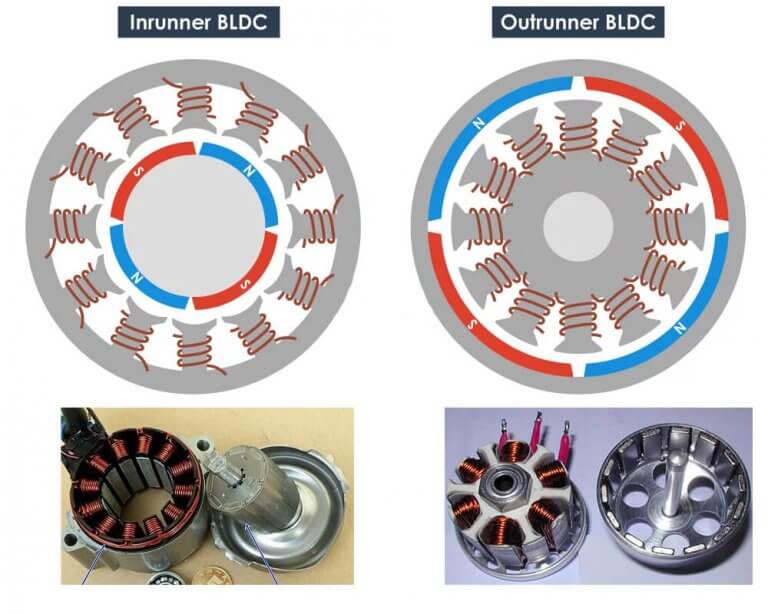
- По своей конструкции БДПТ могут быть с внутренним (inrunner) и внешним (outrunner) расположением ротора.
- По сравнению с другими двигателями БДПТ имеют ряд преимуществ, основными из которых являются отсутствие щеток и искрения, большой кпд и высокая надежность.
Принцип работы бесколлекторного мотора
Здесь все наоборот, у моторов бесколлекторного типа отсутствуют как щетки так и коллектор. Магниты в них располагаются строго вокруг вала и выполняют функцию ротора. Обмотки, которые имеют уже несколько магнитных полюсов, размещаются вокруг него. На роторе бесколлектоных моторов устанавливается так называемый сенсор (датчик) который будет контролировать его положение и передавать эту информацию процессору который работает в купе с регулятором скорости вращения (обмен данными о положении ротора происходит более 100 раз в секунду). На выходе мы получаем более плавную работу самого мотора с максимальной отдачей.

Бесколлекторные моторы могут быть с датчиком (сенсором) и без него. Отсутствие датчика незначительно снижает эффективность работы мотора, поэтому их отсутствие вряд ли расстроит новичка, но зато, приятно удивит ценник. Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Основные характеристики двигателя
- Режим работы на который рассчитан двигатель: длительный или кратковременный. Длительный режим работы подразумевает, что двигатель может работать часами. Такие двигатели рассчитываются таким образом, чтобы теплоотдача в окружающую среду была выше тепловыделения самого двигателя. В этом случае он не будет разогреваться. Пример: вентиляция, привод эскалатора или конвейера. Кратковременный — подразумевает, что двигатель будет включаться на короткий период, за который не успеет разогреться до максимальной температуры, после чего следует длительный период, за время которого двигатель успевает остыть. Пример: привод лифта, электробритвы, фены.
- Сопротивление обмотки двигателя. Сопротивление обмотки двигателя влияет на КПД двигателя. Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
- Максимальное рабочее напряжение. Максимальное напряжение, которое способна выдержать обмотка статора. Максимальное напряжение взаимосвязано со следующим параметром.
- Максимальные обороты. Иногда указывают не максимальные обороты, а Kv — количество оборотов двигателя на один вольт без нагрузки на валу. Умножив этот показатель на максимальное напряжение, получим максимальные обороты двигателя без нагрузки на валу.
- Максимальный ток. Максимально допустимый ток обмотки. Как правило, указывается и время, в течение которого двигатель может выдержать указанный ток. Ограничение максимального тока связано с возможным перегревом обмотки. Поэтому при низких температурах окружающей среды реальное время работы с максимальным током будет больше, а в жару двигатель сгорит раньше.
- Максимальная мощность двигателя. Напрямую связана с предыдущим параметром. Это пиковая мощность, которую двигатель может развить на небольшой период времени, обычно — несколько секунд. При длительной работе на максимальной мощности неизбежен перегрев двигателя и выход его из строя.
- Номинальная мощность. Мощность, которую двигатель может развивать на протяжении всего времени включения.
- Угол опережения фазы (timing). Обмотка статора имеет некоторую индуктивность, которая затормаживает рост тока в обмотке. Ток достигнет максимума через некоторое время. Для того, чтобы компенсировать эту задержку переключение фаз выполняют с некоторым опережением. Аналогично зажиганию в двигателе внутреннего сгорания, где выставляется угол опережения зажигания с учетом времени воспламенения топлива.
Kv
Возможно, вам также будет интересно
В не столь давние времена в нашей «самой передовой стране в мире с самым передовым колхозным строем», во что мы свято верили, имел место простой принцип: для того что коровы использовали меньше корма и давали больше молока, их нужно меньше кормить и больше доить. Вот только статистика это не подтверждала. Да и коровки из подсобного личного хозяйства, пасшиеся на лугу и евшие «от пуза» летом тра…
В последнее время мы все чаще слышим об «Индустрии 4.0», цифровом производстве, да и само понятие цифровизации проникло во все сферы деятельности. Коснулось оно и производственных предприятий — в том числе в области охраны труда, в рамках общепринятой концепции нулевого травматизма (Vision Zero). При продвижении в сфере цифровизации невозможно обойтись без информационной системы для обеспечения…
Когда таинственные существа атакуют промышленную систему автоматики, возникает проблема: что происходит с нашей сетью? Поскольку Ethernet становится стандартом в автоматике, появились специальные инструменты и техники, помогающие находить причины неправильной работы. Познакомься с советами, послушай, что говорят другие.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.
 Коммутацию следует производить таким образом, чтобы Ф0 (поток возбуждения ротора) поддерживался относительно потока якоря постоянным. При взаимодействии такого возбуждения и потока якоря формируется вращающий момент М, стремящийся развернуть ротор и параллельно обеспечить совпадение возбуждения и потока якоря. Однако во время поворота ротора происходит переключение различных обмоток под воздействием датчика положения ротора, в результате чего поток якоря разворачивается по направлению к следующему шагу.
Коммутацию следует производить таким образом, чтобы Ф0 (поток возбуждения ротора) поддерживался относительно потока якоря постоянным. При взаимодействии такого возбуждения и потока якоря формируется вращающий момент М, стремящийся развернуть ротор и параллельно обеспечить совпадение возбуждения и потока якоря. Однако во время поворота ротора происходит переключение различных обмоток под воздействием датчика положения ротора, в результате чего поток якоря разворачивается по направлению к следующему шагу.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Примечание: существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Большой диаметр, большое число полюсов
В компании Bosch Rexroth Corp. отмечают другие преимущества высокомоментных двигателей DDR, такие как лучшее согласование с инерцией нагрузки, лёгкость управления, низкий уровень шума и рациональную конструкцию (см. диаграмму «Прямой привод упрощает конструкцию средств автоматизации»). Карл Рапп, руководитель отделения станкостроения Electric Drives & Controls Div. компании, подтверждает, что увеличение числа полюсных пар и диаметра ротора создаёт более высокий крутящий момент на выходе. Кроме того, оптимизация ориентации магнита, усовершенствование конфигурации пазов статора и технологии наматывания обмотки, а также конструкции воздушного зазора способны свести пульсации крутящего момента к минимуму. «Низкий уровень пульсаций крутящего момента требуется для обеспечения высокого качества операций шлифования/ хонингования, это качество также необходимо и в других областях применения», — говорит Рапп.
Технология, лежащая в основе высокомоментных двигателей прямого привода, позволяет упростить конструкцию станка и повысить точность перемещения. Это показано выше на примере делительно-поворотного стола. При этом исключается люфт в редукторе и приводном ремне
В компании Danaher Motion также считают, что большой диаметр и повышенное число полюсов являются отличительными признаками высокомоментных электродвигателей прямого привода. «Крутящий момент квадратично зависит от диаметра и прямо пропорционально от длины ротора» — поясняет Том Инглэнд, директор по управлению производством компании. «Повышенное число полюсов, которое обеспечивает более высокое удельное содержание меди в обмотках, создающих крутящий момент, приводит к повышению эффективности магнитного поля», — констатирует Инглэнд.
Высокомоментные двигатели DDR предлагаются на рынке в двух классических вариантах. Вариант «бескорпусного» двигателя состоит из кольцеобразного ротора и набора элементов статора, которые заказчик должен встроить в конструкцию станка. По мнению Инглэнда должны быть также предусмотрены средства обратной связи и охлаждения, а также соединительные кабели, что требует выполнения существенного объема конструкторских и сборочно-монтажных работ. Тонкая кольцеобразная конструкция «бескорпусного» двигателя отличается применением полого входного вала большого размера. «Смонтированный в корпусе» двигатель DDR имеет корпус, подшипники, а также стандартный или полый вал. «Однако если станок уже оснащён подшипниками, смонтированный в корпусе двигатель не будет работать, поскольку непосредственное соединение трех (и более) подшипников на одной оси вызовет их повреждение», — продолжает он.
Недавно компания Danaher Motion реализовала другой подход, разработав третий, усовершенствованный вариант двигателя DDR, в основу которого, как сообщается, заложены преимущества предшествующих вариантов при одновременном исключении их недостатков. Под названием «кассетный DDR» (или CDDR) эти высокомоментные электродвигатели сохранили повышенное число полюсов и большой диметр, но не имеют подшипников. «Ротор устанавливается на подшипниках оборудования заказчика, что обеспечивает упрощенный монтаж при минимальном объеме конструкторской работы, а также возможность демонтажа двигателя без разборки станка,»- комментирует Инглэнд.
По мнению представителя компании Danaher, так сложилось исторически, что недостатком двигателей прямого привода всегда оставалась сложность их применения и стоимость. «Ситуация изменилась с внедрением технологии двигателей CDDR. Эта технология сделала доступными преимущества прямого привода как для простых механизмов, так и для классических, высокопроизводительных приложений сервоприводов», — заключает Инглэнд. Сегодня двигатели по технологии CDDR находят применение в упаковочном оборудовании, механизмах подачи прессов, в механизмах и оборудовании, используемых в перерабатывающей промышленности, в типографском и медицинском оборудовании.